時鐘晶體振蕩器的抖動定義與作用
來源:http://www.sqlianchuang.cn 作者:泰河電子晶振技術部 2019年06月18
高速通信和測量系統的不斷進步需要系統時鐘和參考的更高性能水平。過去可接受的性能可能不足以支持高速同步設備。也許最重要和最不被理解的時鐘性能測量是抖動。
這次討論的目的有四個。
1. 直觀地定義抖動,并討論它的屬性。
2. 解釋抖動如何降低系統性能。
3. 描述測量抖動的各種實用方法,包括每種方法的相關性和易用性。
4. 提供指定高速時鐘和相關設備的指南。
抖動定義:
o 抖動:“數字信號從其理想位置及時的重要瞬間的短期變化”(ITU)。
數字數據流中的預期邊緣永遠不會出現在所需的位置。定義和測量這些邊沿的定時精度(抖動)對于同步通信系統的性能至關重要。
具有抖動邊緣的數字波形
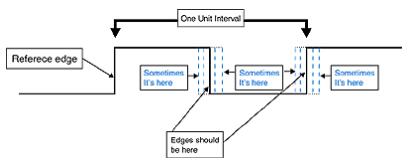
圖1
術語的定義:
a. 以單位間隔表示的抖動:單個單位間隔是時鐘頻率的一個周期。這是標準化的時鐘周期。以單位間隔表示的抖動將抖動的大小描述為一個單位間隔的小數部分。
b. 以度(度)表示的抖動:以度表示的抖動以度為單位描述抖動的幅度。其中一個周期等于360度。
c. 以絕對時間表示的抖動:以時間單位表示的抖動以適當的數量級(通常為皮秒)描述抖動的幅度。
d. 表示為功率測量的抖動以弧度或單位間隔平方為單位進行描述。通常以dB為單位表示相對于一個周期平方 (來自Bellamy) [1]
e. 模式抖動:模式相關的抖動。有時也稱為翻邊。本質上不隨意。一般是次諧波的結果。在時域中查看時,它被視為多種抖動模式。模式抖動是確定性的,這是一種可歸因于獨特源的現象。本討論中提到的所有其他抖動本質上是隨機的,并且可能僅被描述為關于時間的隨機變量。
例如:
假設時鐘晶體振蕩器速率為155.52 MHz。一個單位間隔將等于信號的周期,1 / 155.52MHz = 6.43nsec。= 360度
假設100 ps Pk-Pk的抖動。
100 Ps的抖動= .01555單位間隔(UI)的抖動= 5.598度。抖動 (所有Pk-Pk)所有三個測量都描述了相同的抖動量。
對于抖動功率,使用rms(一個sigma )測量。對于上述情況,我們將Pk-Pk近似為
)測量。對于上述情況,我們將Pk-Pk近似為 RMS值的7 或7倍,放置有效值。抖動功率為.0000049 UI 2。{(。01555/7)2。以dB表示,相對于一個單位間隔,在這種情況下的抖動功率將是10log(.0000049)= -53.1dB ui。如稍后將看到的,可以從功率譜密度(相位噪聲)測量導出抖動。表1涉及155.52 MHz系統時鐘中各種抖動測量。
RMS值的7 或7倍,放置有效值。抖動功率為.0000049 UI 2。{(。01555/7)2。以dB表示,相對于一個單位間隔,在這種情況下的抖動功率將是10log(.0000049)= -53.1dB ui。如稍后將看到的,可以從功率譜密度(相位噪聲)測量導出抖動。表1涉及155.52 MHz系統時鐘中各種抖動測量。
表1
抖動帶寬和頻譜內容
圖1中邊緣的位移是噪聲的結果。噪聲具有光譜含量和功率。因此,圖1中的邊緣抖動也具有頻譜內容。圖1中的邊緣隨時間隨機變化,但導致抖動的噪聲在所有頻率上不一定均勻。由于100 kHz噪聲,10 kHz噪聲引起的抖動可能大于或小于抖動。時鐘抖動的頻譜內容根據用于生成時鐘的技術而有很大差異。測量的抖動也隨測量技術和抖動帶寬而變化。指定或測量的抖動不正確可能導致不必要的成本或系統性能不佳。參見參考文獻[2,3]有關定義和指定電信系統中抖動的其他信息。各種時鐘源的抖動特性將在本文后面討論。
抖動如何影響系統性能
抖動對通信系統的影響遠遠超出了本討論的范圍。有關更徹底的治療,請參閱參考文獻[1,4]。簡單的討論可能有助于理解數字系統中抖動的有害影響。
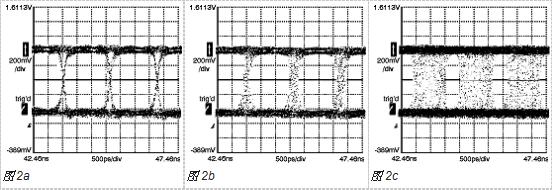
通過同步通信系統傳輸的每一位數據都在接收器處對其值進行采樣。采樣數據只能具有邏輯1或0的值。采樣數據的最佳點位于每個發送時鐘周期的中心。為了執行此功能,接收器將其自己的時鐘與用于傳輸數據的時鐘對齊。圖2,a,b和c分別表示理想的,典型的和損壞的數據流。通常稱為“眼圖”,每個圖是由于噪聲或抖動引起的邊緣放置的累積圖形畫像。理想情況下,采樣發生在“眼睛”的中心。隨著邊緣抖動的增加,明顯的眼睛開始閉合。結果,出現錯誤的可能性,即.... 將邏輯1誤認為是零的可能性更大。石英晶體振蕩器噪聲引起的抖動只是電信系統抖動的一個來源。系統設計人員必須考慮電信系統中的許多噪聲源。時鐘源引入的抖動是噪聲的一個組成部分,只能成為“誤差預算”的一部分,必須根據性能要求和成本進行權衡。
測量技術
時域測量
使用延遲線的邊緣到邊緣抖動
時鐘抖動的真正衡量標準是時鐘邊沿隨時間的精確位置。檢查邊緣位置的最直接方法是使用示波器觀察邊緣。遺憾的是,使用標準示波器技術無法在絕對時間內識別各個時鐘邊沿。使用標準示波器測量的任何抖動都是由于觸發不穩定造成的。因此,使用示波器(即使是非常好的示波器)進行直接波形測量也不是有效的抖動測量。另一種技術用于定位參考邊緣,與時間進行區分,并檢查后續邊緣上的抖動。圖3以典型配置說明了這種方法。
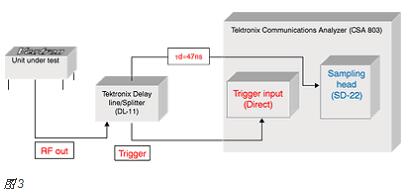
被測單元的輸出被饋入分路器/延遲線。分路器的非延遲輸出被饋送到示波器的外部觸發輸入(在這種情況下為CSA-803)。DL-11的延遲輸出連接到示波器的輸入。通過在觸發器之后一次檢查時鐘流等于所使用的延遲(在這種情況下,47納秒),觸發邊緣被定位。在識別出觸發邊緣之后,檢查下一個邊緣。然后產生測量的第二邊緣抖動的直方圖。
CSA-803用于其統計和直方圖功能。這是一種有用的技術,受延遲線的長度和示波器的速度/靈敏度的限制。適用于大于1 /(2
 d),測量受示波器噪聲的限制。低于1 /(2
d),測量受示波器噪聲的限制。低于1 /(2
 d),靈敏度下降約2??0 dB / decade。對于圖3中所示的47nsec延遲,轉角頻率出現在3.3MHz。使用CSA-803可以將3.3 MHz以上頻率引起的所有抖動分解為大約5 ps。330 kHz時的抖動無法在50 ps以下解析。以類似的方式,在500 ps以下無法測量33 kHz的抖動。圖4是使用47納秒延遲線的RMS抖動靈敏度圖。了解此測量方法的優點和局限性至關重要。對于給出的數值示例,將不會看到低于300 kHz的低頻抖動。相反,可以很容易地識別由邊帶3.0 MHz偏移或更多引起的抖動。當測量采用直接倍頻的振蕩器或不考慮低頻抖動時,該測試方法是合適的。(參見模式抖動的先前描述)。
d),靈敏度下降約2??0 dB / decade。對于圖3中所示的47nsec延遲,轉角頻率出現在3.3MHz。使用CSA-803可以將3.3 MHz以上頻率引起的所有抖動分解為大約5 ps。330 kHz時的抖動無法在50 ps以下解析。以類似的方式,在500 ps以下無法測量33 kHz的抖動。圖4是使用47納秒延遲線的RMS抖動靈敏度圖。了解此測量方法的優點和局限性至關重要。對于給出的數值示例,將不會看到低于300 kHz的低頻抖動。相反,可以很容易地識別由邊帶3.0 MHz偏移或更多引起的抖動。當測量采用直接倍頻的振蕩器或不考慮低頻抖動時,該測試方法是合適的。(參見模式抖動的先前描述)。
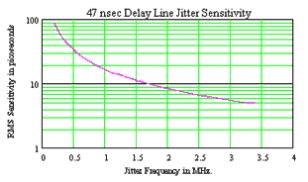
Sens(f)= 其中:
Sens(f)=抖動靈敏度
 d =使用的延遲量
d =使用的延遲量
f =要測量的抖動頻率
r =示波器分辨率
圖4
使用鎖相環的抖動測量
值得注意的是延遲的長度測量邊緣抖動時,線路限制分辨率。為了測量低于100Hz偏移的抖動,人們只需要訂購大約三百英里的極低損耗延遲線。代替這種裝置,鎖相環用于各種噪聲測量。
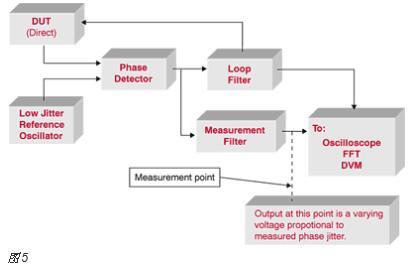
圖4顯示了用于測量時鐘源噪聲的鎖相環(PLL)的基本元件。 Gardner [5], Best [6]和 Woolover [7]是理解PLL的三個很好的參考。一些關鍵循環要求如下:
o PLL環路帶寬是成功測量的關鍵參數。系統僅測量環路帶寬之外(高于)環路帶寬的抖動頻率。建議將環路帶寬設置為最感興趣的最低抖動頻率的1/10。
o 環路阻尼必須設置為至少5,以減少PLL中的抖動峰值。抖動峰值會增加測量的抖動。
o 測量濾波器對應于Bellcore和ITU規范中建議的抖動帶寬。有關抖動帶寬和規格的列表,請參閱[2,3]。頻帶限制需要定義為任何有效測量的前提條件。
o 相位檢測器(PD)的輸出是變化的DC信號,其與由于抖動引起的變化相位成比例。有必要知道以伏特/弧度為單位的PD的增益常數(Kd),以便量化檢測到的抖動。例如,對于具有10度的振蕩器,Kd等于1毫伏/度的相位檢測器將具有10mV的峰峰值輸出。Pk-Pk抖動。可能需要注入已知量的抖動以校準系統以進行精確測量。
使用鎖相環的抖動測量
:解釋數據。
o 在時域中,圖5中相位檢測器的輸出信號包含有關測量時鐘抖動的大量信息。使用示波器直接檢查信號可以顯示Pk-Pk抖動。真正的RMS電壓表可用于測量RMS(一個西格瑪)抖動。對于這些測量,使用的測量濾波器代表感興趣的抖動頻率帶是至關重要的。當需要10 kHz至1 MHz的帶寬時,測量直流至10 MHz的噪聲是沒有意義的。具有直方圖和統計功能的示波器可用于表征測量的抖動。
o 在頻域中,來自圖4中的相位檢測器的輸出信號的頻譜表示頻域中的頻譜和抖動的相對幅度。使用低頻或FFT分析儀檢查頻譜,可以在頻譜方面提供最直觀的時鐘抖動圖。通過在所關注的頻率上積分信號抖動頻譜,可以導出時鐘的RMS抖動。這是用于表征抖動的最準確且最不幸的方法,需要專門的測試設備。數字示例如下所示,并包含在 附錄A中。
指定抖動性能
只要符合以下條件,良好的抖動性能和低成本并不相互排斥:
o 抖動的系統要求根據幅度和頻譜來定義。
o 用于生成時鐘輸出頻率的方法對于應用來說是最佳的。
系統要求:
雖然無法解決所有可能的變化,但基于多年振蕩器制造的一些一般性建議可能會有所幫助。
雖然不是對所有應用的完整調查,但表1是指定振蕩器性能的起點。高于1 kHz的抖動被認為是高頻抖動。
應用性能要求
表1
注1:總體抖動性能高度依賴于環路參數。
時鐘產生:
可以采用各種方法來產生高頻時鐘。
根據所使用的技術,性能可能會有很大差異。低于20 MHz,可以假設直接晶體頻率產生對于除最關鍵要求之外的所有要求都是足夠的。對于20 MHz及以上的低抖動應用,應考慮低噪聲選項。表2可用作選擇具有成本效益的解決方案的起點。表2中列出的方法的變化和組合也可以是最佳解決方案。
抖動性能
表2
結論
為了正確指定頻率源的性能,應考慮抖動頻率和幅度。這需要了解抖動,測量技術及其局限性。花在確定系統需求上的時間將減少問題,并減少以后修復這些問題的時間。它還將為每種應用確定一種經濟有效的方法。
在本文中,我們討論了抖動的定義,用于描述抖動的單位,以及為什么抖動是一個重要參數。我們還回顧了用于測量抖動的技術,以及基于各種振蕩器的應用和典型性能。討論絕不是完整的,但應該給讀者足夠的信息來理解所涉及的問題。列出了行業標準,以及進一步閱讀的參考資料。希望本文有用,并被認為是理解和指定抖動的良好起點。
這次討論的目的有四個。
1. 直觀地定義抖動,并討論它的屬性。
2. 解釋抖動如何降低系統性能。
3. 描述測量抖動的各種實用方法,包括每種方法的相關性和易用性。
4. 提供指定高速時鐘和相關設備的指南。
抖動定義:
o 抖動:“數字信號從其理想位置及時的重要瞬間的短期變化”(ITU)。
數字數據流中的預期邊緣永遠不會出現在所需的位置。定義和測量這些邊沿的定時精度(抖動)對于同步通信系統的性能至關重要。
具有抖動邊緣的數字波形
圖1
術語的定義:
a. 以單位間隔表示的抖動:單個單位間隔是時鐘頻率的一個周期。這是標準化的時鐘周期。以單位間隔表示的抖動將抖動的大小描述為一個單位間隔的小數部分。
b. 以度(度)表示的抖動:以度表示的抖動以度為單位描述抖動的幅度。其中一個周期等于360度。
c. 以絕對時間表示的抖動:以時間單位表示的抖動以適當的數量級(通常為皮秒)描述抖動的幅度。
d. 表示為功率測量的抖動以弧度或單位間隔平方為單位進行描述。通常以dB為單位表示相對于一個周期平方 (來自Bellamy) [1]
e. 模式抖動:模式相關的抖動。有時也稱為翻邊。本質上不隨意。一般是次諧波的結果。在時域中查看時,它被視為多種抖動模式。模式抖動是確定性的,這是一種可歸因于獨特源的現象。本討論中提到的所有其他抖動本質上是隨機的,并且可能僅被描述為關于時間的隨機變量。
例如:
假設時鐘晶體振蕩器速率為155.52 MHz。一個單位間隔將等于信號的周期,1 / 155.52MHz = 6.43nsec。= 360度
假設100 ps Pk-Pk的抖動。
100 Ps的抖動= .01555單位間隔(UI)的抖動= 5.598度。抖動 (所有Pk-Pk)所有三個測量都描述了相同的抖動量。
對于抖動功率,使用rms(一個sigma
| Pk-Pk抖動秒 | 學位 | 單位間隔 | 單位間隔 | 抖動功率 |
| 6.43E-09 =一個周期 | 學位(Pk-Pk) | Pk-Pk單位 | RMS單位 | dBui |
| 標準化 | 標準化 | 標準化 | ||
| 1.00E-10 | 5.60 | 0.015552 | 0.0022217 | -53.07 |
| 2.00E-11 | 1.12 | 0.003110 | 0.0004443 | -67.05 |
| (Pk-Pk的1/7 | ||||
| 近似) |
抖動帶寬和頻譜內容
圖1中邊緣的位移是噪聲的結果。噪聲具有光譜含量和功率。因此,圖1中的邊緣抖動也具有頻譜內容。圖1中的邊緣隨時間隨機變化,但導致抖動的噪聲在所有頻率上不一定均勻。由于100 kHz噪聲,10 kHz噪聲引起的抖動可能大于或小于抖動。時鐘抖動的頻譜內容根據用于生成時鐘的技術而有很大差異。測量的抖動也隨測量技術和抖動帶寬而變化。指定或測量的抖動不正確可能導致不必要的成本或系統性能不佳。參見參考文獻[2,3]有關定義和指定電信系統中抖動的其他信息。各種時鐘源的抖動特性將在本文后面討論。
抖動如何影響系統性能
抖動對通信系統的影響遠遠超出了本討論的范圍。有關更徹底的治療,請參閱參考文獻[1,4]。簡單的討論可能有助于理解數字系統中抖動的有害影響。
通過同步通信系統傳輸的每一位數據都在接收器處對其值進行采樣。采樣數據只能具有邏輯1或0的值。采樣數據的最佳點位于每個發送時鐘周期的中心。為了執行此功能,接收器將其自己的時鐘與用于傳輸數據的時鐘對齊。圖2,a,b和c分別表示理想的,典型的和損壞的數據流。通常稱為“眼圖”,每個圖是由于噪聲或抖動引起的邊緣放置的累積圖形畫像。理想情況下,采樣發生在“眼睛”的中心。隨著邊緣抖動的增加,明顯的眼睛開始閉合。結果,出現錯誤的可能性,即.... 將邏輯1誤認為是零的可能性更大。石英晶體振蕩器噪聲引起的抖動只是電信系統抖動的一個來源。系統設計人員必須考慮電信系統中的許多噪聲源。時鐘源引入的抖動是噪聲的一個組成部分,只能成為“誤差預算”的一部分,必須根據性能要求和成本進行權衡。
測量技術
時域測量
使用延遲線的邊緣到邊緣抖動
時鐘抖動的真正衡量標準是時鐘邊沿隨時間的精確位置。檢查邊緣位置的最直接方法是使用示波器觀察邊緣。遺憾的是,使用標準示波器技術無法在絕對時間內識別各個時鐘邊沿。使用標準示波器測量的任何抖動都是由于觸發不穩定造成的。因此,使用示波器(即使是非常好的示波器)進行直接波形測量也不是有效的抖動測量。另一種技術用于定位參考邊緣,與時間進行區分,并檢查后續邊緣上的抖動。圖3以典型配置說明了這種方法。
被測單元的輸出被饋入分路器/延遲線。分路器的非延遲輸出被饋送到示波器的外部觸發輸入(在這種情況下為CSA-803)。DL-11的延遲輸出連接到示波器的輸入。通過在觸發器之后一次檢查時鐘流等于所使用的延遲(在這種情況下,47納秒),觸發邊緣被定位。在識別出觸發邊緣之后,檢查下一個邊緣。然后產生測量的第二邊緣抖動的直方圖。
CSA-803用于其統計和直方圖功能。這是一種有用的技術,受延遲線的長度和示波器的速度/靈敏度的限制。適用于大于1 /(2
Sens(f)= 其中:
Sens(f)=抖動靈敏度
f =要測量的抖動頻率
r =示波器分辨率
圖4
使用鎖相環的抖動測量
值得注意的是延遲的長度測量邊緣抖動時,線路限制分辨率。為了測量低于100Hz偏移的抖動,人們只需要訂購大約三百英里的極低損耗延遲線。代替這種裝置,鎖相環用于各種噪聲測量。
圖4顯示了用于測量時鐘源噪聲的鎖相環(PLL)的基本元件。 Gardner [5], Best [6]和 Woolover [7]是理解PLL的三個很好的參考。一些關鍵循環要求如下:
o PLL環路帶寬是成功測量的關鍵參數。系統僅測量環路帶寬之外(高于)環路帶寬的抖動頻率。建議將環路帶寬設置為最感興趣的最低抖動頻率的1/10。
o 環路阻尼必須設置為至少5,以減少PLL中的抖動峰值。抖動峰值會增加測量的抖動。
o 測量濾波器對應于Bellcore和ITU規范中建議的抖動帶寬。有關抖動帶寬和規格的列表,請參閱[2,3]。頻帶限制需要定義為任何有效測量的前提條件。
o 相位檢測器(PD)的輸出是變化的DC信號,其與由于抖動引起的變化相位成比例。有必要知道以伏特/弧度為單位的PD的增益常數(Kd),以便量化檢測到的抖動。例如,對于具有10度的振蕩器,Kd等于1毫伏/度的相位檢測器將具有10mV的峰峰值輸出。Pk-Pk抖動。可能需要注入已知量的抖動以校準系統以進行精確測量。
使用鎖相環的抖動測量
:解釋數據。
o 在時域中,圖5中相位檢測器的輸出信號包含有關測量時鐘抖動的大量信息。使用示波器直接檢查信號可以顯示Pk-Pk抖動。真正的RMS電壓表可用于測量RMS(一個西格瑪)抖動。對于這些測量,使用的測量濾波器代表感興趣的抖動頻率帶是至關重要的。當需要10 kHz至1 MHz的帶寬時,測量直流至10 MHz的噪聲是沒有意義的。具有直方圖和統計功能的示波器可用于表征測量的抖動。
o 在頻域中,來自圖4中的相位檢測器的輸出信號的頻譜表示頻域中的頻譜和抖動的相對幅度。使用低頻或FFT分析儀檢查頻譜,可以在頻譜方面提供最直觀的時鐘抖動圖。通過在所關注的頻率上積分信號抖動頻譜,可以導出時鐘的RMS抖動。這是用于表征抖動的最準確且最不幸的方法,需要專門的測試設備。數字示例如下所示,并包含在 附錄A中。
指定抖動性能
只要符合以下條件,良好的抖動性能和低成本并不相互排斥:
o 抖動的系統要求根據幅度和頻譜來定義。
o 用于生成時鐘輸出頻率的方法對于應用來說是最佳的。
系統要求:
雖然無法解決所有可能的變化,但基于多年振蕩器制造的一些一般性建議可能會有所幫助。
雖然不是對所有應用的完整調查,但表1是指定振蕩器性能的起點。高于1 kHz的抖動被認為是高頻抖動。
應用性能要求
| 系統應用 | 難度 | 低頻率 | 高頻 | 可能 |
| 抖動重要性 | 抖動重要性 | 類型 | ||
|
看看 表2 |
||||
| 雷達 | 非常困難的噪音應用 | 危急 | 危急 | A B C D |
| 超聲/ MRI | 非常困難的噪音應用 | 危急 | 危急 | A B C D |
| 導航/ GPS | 難以應用的噪音 | 危急 | 高 | A B C D |
| 傳輸系統(電信) | ||||
| 公共網絡 | 中等噪聲應用 | 中等 | 中等 | A B C D |
| 專用網絡(LAN) | 通常最簡單的應用 | 低 | 低 | A,B,F |
| 頻率合成(見注1) | ||||
| 低頻率 參考 | 中度嚴重 | 中度低 | A,B,C | |
| 高頻源 | 中度低 | 中度嚴重 | D,E,F |
注1:總體抖動性能高度依賴于環路參數。
時鐘產生:
可以采用各種方法來產生高頻時鐘。
根據所使用的技術,性能可能會有很大差異。低于20 MHz,可以假設直接晶體頻率產生對于除最關鍵要求之外的所有要求都是足夠的。對于20 MHz及以上的低抖動應用,應考慮低噪聲選項。表2可用作選擇具有成本效益的解決方案的起點。表2中列出的方法的變化和組合也可以是最佳解決方案。
抖動性能
| 技術 | 成本 | LF抖動 | 高頻抖動 | 評論 | 類型 |
| 1是最低的 | 1是最好的 | 1是最好的 | |||
| 3是最高的 | 3是最糟糕的 | 3是最糟糕的 | |||
| 直接時鐘/ TCXO | 1 | 2 | 1或2 | 非常好的抖動 | 一個 |
| 直接VCXO | 2 | 1 | 1或2 | 非常好的抖動 | 乙 |
| 直接烤箱 | 3 | 1 | 1 | 優秀的抖動 | C |
| 調諧乘法 | 2 | 1 | 1或2 | 周期性抖動 | d |
| 離散PLL | 2 | 2 | 2或3 | 好抖動 | Ë |
| 單片PLL | 1 | 3 | 2或3 | 關閉抖動很差 | F |
結論
為了正確指定頻率源的性能,應考慮抖動頻率和幅度。這需要了解抖動,測量技術及其局限性。花在確定系統需求上的時間將減少問題,并減少以后修復這些問題的時間。它還將為每種應用確定一種經濟有效的方法。
在本文中,我們討論了抖動的定義,用于描述抖動的單位,以及為什么抖動是一個重要參數。我們還回顧了用于測量抖動的技術,以及基于各種振蕩器的應用和典型性能。討論絕不是完整的,但應該給讀者足夠的信息來理解所涉及的問題。列出了行業標準,以及進一步閱讀的參考資料。希望本文有用,并被認為是理解和指定抖動的良好起點。
正在載入評論數據...
相關資訊
- [2023-07-12]康納溫菲爾德推出符合Stratum3E...
- [2023-06-26]選擇石英晶體要了解的必要參數,...
- [2023-06-25]艾伯康公司發布連續電壓有源晶振...
- [2021-01-18]今日主題:什么樣性能的石英晶振...
- [2021-01-13]是什么原因造成晶振相噪惡化?都...
- [2020-12-09]干貨干貨!愛普生旗下SG-8018系列...
- [2020-09-08]石英Crystal工作原理是怎樣的,這...
- [2020-09-01]Oscillator的制造流程究竟是怎樣...